|
یک روش حل برای معادله 4 با شرایط مرزی داده شده در معادله 6 استفاده از رابطه زیر است:

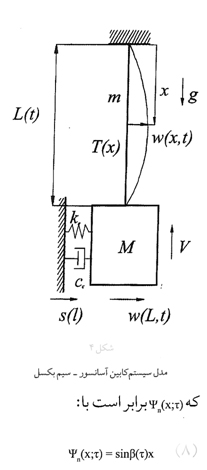
و نشان دهنده تغییرات تدریجی مدهای ارتعاش طبیعی است که مربوط به سیستم کابل – کابین با توزیع یکنواخت تغییرات تدریجی کشش متوسط بوده و با 
نمایش داده می شود . تغییرات تدریجی مقدار ویژه βn به کمک معادله فرکانس داده شده ذیل تعریف شده است:
بایستی توجه شود که مقدار ویژه βn مربوط به فرکانس طبیعی nω است و با 
مشخص می شود و  سرعت موج های افقی را نشان می دهد. به جای بسط دادنمعادله 7 به معادله حرکت (4) و شرایط مرزی (6) عمود کردن نسبت به مد طبیعی و سپس وقتی که عبارت ( € )o و ( 2€ )o کنار گذاشته شد، سیستم با استفاده از معادله تغییرات ذیل رفتار دینامیکی نتایج سیستم کابین – کابل را نشان می دهد. سرعت موج های افقی را نشان می دهد. به جای بسط دادنمعادله 7 به معادله حرکت (4) و شرایط مرزی (6) عمود کردن نسبت به مد طبیعی و سپس وقتی که عبارت ( € )o و ( 2€ )o کنار گذاشته شد، سیستم با استفاده از معادله تغییرات ذیل رفتار دینامیکی نتایج سیستم کابین – کابل را نشان می دهد.

پاسخ دینامیکی سیستم کابین سیم بکسل در معرض تحریکات ریل راهنما قرار دارد.
قیود تشریح شده بالا برای هدایت مطالعات شبیه سازی نوسانات افقی سیستم کابین – سیم بکسل به کار می رود. تعلیق نوعی سیستم کششی کابل 2:1 شامل 6 عدد سیم بکسل Enurance Dyform12 میلیمتری با جرم واحد طول 0.65m/kg=m است. شبیه سازی با صعود و نزول کابین با بار ماکزیمم به جرم 2000kg و بار نامی 1250kgدر سرعت های مختلف رابطه تنگاتنگی دارد. ارتفاع درست 70m، ارتفاع کابین 3.2m و طول کل جابجایی m60 است. سیستم در معرض نوسان دوره ای به دلیل گام ها و قسمت های مفاصل ریل راهنما می باشد که نتیجه ای از انباشتگی تلرانس های ساختی برای تنظیم قسمت های ریل می باشد.فرض می شود که قسمت های ریل 5 متر طول دارند و دامنه 1 میلیمتر در شبیه سازی اعمال می شود.نسبت میرایی 0.5% برای سیستم کابل تعلیق در نظر گرفته شده، ضریب سختی کفشک هادی کابین – ریل برابرke=2083N/mو (Zhu & Ni 2000) است و رابطه میرایی معادل50% است. این مقدار راندمان ایزولاسیون مطلوبی را در منطقه رزونانس که قبلا بحث شد فراهم می کند.
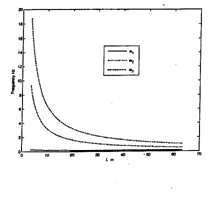
اولین سه فرکانس طبیعی ( رزونانس) سیستم به وسیله معادله 9 مشخص شده و نیز در طول سیم بکسل ( به وسیله شکل 5) ترسیم شده است. طول کابل به آرامی تغییر می کند. این تغییر تدریجی می تواند با پارامتر ناچیزی که در معادله 3 داده شده تشخیص داده شود. با اعمال طول ماکزیمم می توان فرکانس متناظر می توان فرکانس متناظر را بیابیم و حیطه سرعت را در محدوده 5- 5. 1 متر بر ثانیه کنترل کنیم. حاصل معادله 3 مقدار ناچیز 0.09-0.02=€ می باشد. بنابراین، را بیابیم و حیطه سرعت را در محدوده 5- 5. 1 متر بر ثانیه کنترل کنیم. حاصل معادله 3 مقدار ناچیز 0.09-0.02=€ می باشد. بنابراین،  است و تاثیر عبارت (€)o و(2€)o در معادله 4 و 6 می تواند ناچیز در نظر گرفته شود. در پی آن معادله تغییرات (10) را می توان برای هدایت شبیه سازی استفاده کرد. است و تاثیر عبارت (€)o و(2€)o در معادله 4 و 6 می تواند ناچیز در نظر گرفته شود. در پی آن معادله تغییرات (10) را می توان برای هدایت شبیه سازی استفاده کرد.
نتایج شبیه سازی
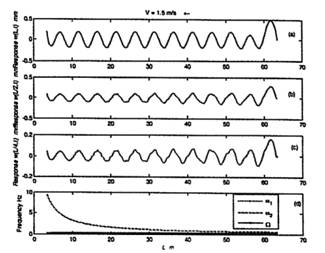
معادله تغییرات 10 به روش عددی در سرعت های 1.5 متر بر ثانیه و 5 متر بر ثانیه حل شده و تغییر مکان در انتهای کابین در قسمت وسط و در ربع اول سیم بکسل محاسبه گردید. نتایج، همگی با در نظر گرفتن نقشه و طرح فرکانس در شکل های 6 تا 9 برای حالت های صعود و نزول نشان داده شده است.
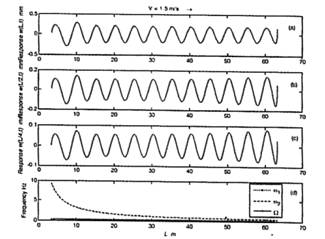
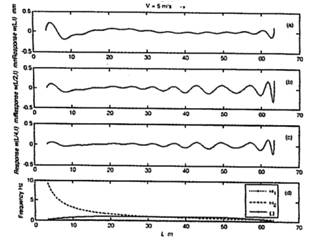
پاسخ کابین در زیر نقشه (a)، پاسخ کابل در وسط و اولین ربع کابل در زیر نقشه (b)و(c) و منحنی فرکانس در زیر نقشه (d) در هر شکل نشان داده شده است. توجه کنید که در سرعت کمتر (m/s1.5=v)فرکانس تحریک ریل به فرکانس تحریک بنیادی سیستم نزدیک است.از این رو آسانسور در محدوده شرایط رزونانس بنیادی فعالیت می کندکه می توتند د هر سیکل صعود یا نزول به ارتعاشات شدید کابین منجر شود.
زمانی که سرعت تاm/s5=v افزایش می یابد، رزنانس بنیادی به مد دوم (در ارتفاعی تقریباً برابر 23 متر) منتقل می شود. این رزونانس بالاتر تاثیر کمتری روی کابین دارد و کیفیت حرکت آن بهتر می شود. به هر حال دومین مد رزنانس ، کابل را تحت تاثیر قرار می دهد که در صعود (بالا رفتن) زیان آورتر از نزول(پایین آمدن) است.
شکل6 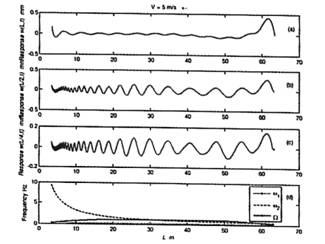
شکل7
شکل8
شکل9
نتیجه
پایین بودن کیفیت حرکت کابین آسانسور در وهله اول ناشی از ایرادات ریل راهنما است. ناصافی، خمیدگی ریل ،نصب غیرصحیح و سطح زیب و خشن باعث ارتعاش کابین و اجزای معلق می شوند. مکانیزم تحریک ریل را می توان با تحریک دوره ای اولیه نشان داد و در مدل دینامیکی استفاده کرد تا بتوان نوع واکنش ارتعاشات کابین آسانسور – سیم بکسل را از پیش تعیین کرد.
مجموعه معلق کابل- کابین سیستمی غیر ایستا می باشد.ویژگی های جرم و سختی سیستم به تدریج در حین حرکت تغییر می کنند. در این میان فرکانس های طبیعی با کاهش طول سیم بکسل افزایش می یابند.عبور از رزونانس در حین حرکت آسانسور رخ میدهد. فرکانس تحریک ریل به سرعت کابین بستگی دارد .بنابراین منطقه رزونانس قابلیت جابجا شدن دارد و کیفیت حرکت با تغییر دادن سرعت آسانسور بهبود بخشیده می شود.
بنابراین کیفیت سیستم راهنما برای کیفیت حرکت امری اساسی محسوب می شود. اگر سیستم راهنما به درستی نصب شده باشد و ریل ها دارای ویژگی های گسترده ای مثل ناصافی و عدم امتداد مستقیم و تخت نبودن باشد ، امکان ندارد که به کیفیت کافی و مناسبی از کارکرد آسانسور برسیم.
نتایجی که در این مقاله نشان داده شده بعضی از مزایای اساسی پاسخ دینامیکی یک سیستم کابین آسانسور – سیم بکسل که در معرض تحریکات ریل راهنما قرار دارد را اثبات می کند.در این پژوهش مکانیزم تحریک با تابع قطعی نشان داده شده که از این رو پاسخ سیستم یک پدیده قطعی است.
در هر صورت عموما طبیعت و ذات ایرادات و نقص های ریل راهنما بایستی به عنوان گروهی از احتمالات دسته بندی شود. اگر ناصافی های ریل راهنما اندازه گرفته شود می بینید که نتایج درمورد یک ریل با ریل دیگر فرق می کند. از چنین طبیعتی به تصادفی یا احتمالی یاد می کنیم . بنابراین ، پاسخ سیستم بکسل – کابین نیز پدیده ای تصادفی است و تحرک به وجود آمده از نقص های ریل راهنما به صورت فرآیندی احتمالی تشریح می شود. در نهایت از روش دینامیکی احتمالی می توان برای پیدا کردن تشریحی از رفتار دینامیکی یسستم کابین آسانسور - کابل تعلیق بر حسب احتمالات و رخدادها استفاده کرد. پایان www.liftiran.com
|





 محل تبلیغ شما
محل تبلیغ شما
 بیمه آسانسور- بیمه ما
بیمه آسانسور- بیمه ما
 آموزشگاه آسانسور آرمان فراز پیمان
آموزشگاه آسانسور آرمان فراز پیمان آسانور-تولید کننده تابلو فرمان آسانسور
آسانور-تولید کننده تابلو فرمان آسانسور
 محل تبلیغ شما
محل تبلیغ شما
 تله کابین77539630
تله کابین77539630

 موسسه خیریه محک
موسسه خیریه محک
 آسانسور 110 - نماینده فروش قطعات آسانسور هیدرولیک ویتور
آسانسور 110 - نماینده فروش قطعات آسانسور هیدرولیک ویتور
 محاسبه و نقشه کشی خودکار آسانسور
محاسبه و نقشه کشی خودکار آسانسور
 محل درج آگهی شما
محل درج آگهی شما
 شرکت بازرسی و مهندسی ایران
شرکت بازرسی و مهندسی ایران مجله دنیای آسانسور
مجله دنیای آسانسور
 امور حسابداری-حسابرسی-بیمه
امور حسابداری-حسابرسی-بیمه
 بیمه آسانسور: البرز
بیمه آسانسور: البرز
 خدمات محاسبه، طراحی و تهیه نقشه آسانسور
خدمات محاسبه، طراحی و تهیه نقشه آسانسور